Guia para usar o PIC16F877A para projetos de motor de passo
O microcontrolador PIC16F877A é amplamente utilizado em muitos projetos eletrônicos porque oferece um bom equilíbrio de recursos e facilidade de uso.Neste guia, examinaremos de perto o PIC16F877A, cobrindo tudo, desde seus modelos de pinagem e CAD até seu uso no controle de motores de passo.Esteja você criando um dispositivo simples ou um projeto de automação complexo, entender como conectar e controlar motores usando este microcontrolador ajudará você a obter os melhores resultados.
Catálogo

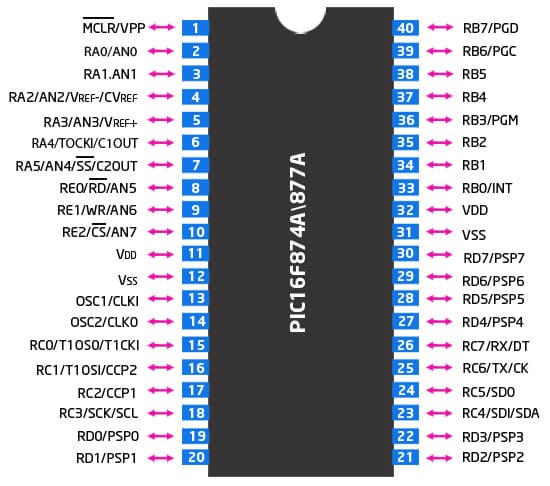
PIC16F877A Configuração do pino
Modelos CAD para PIC16F877A
Símbolo do diagrama PIC16F877A
PIC16F877A PEGADA PCB

Modelo 3D
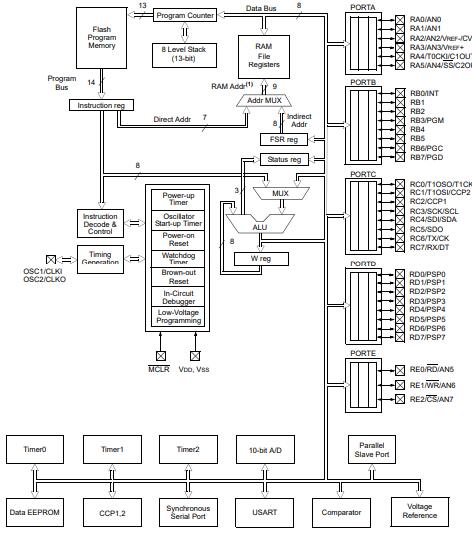
PIC16F877A Estrutura interna
Especificações técnicas detalhadas
| Tipo | Parâmetro |
| Time de entrega da fábrica | 7 semanas |
| Montar | Através do buraco |
| Tipo de montagem | Através do buraco |
| Pacote / caso | 40-DIP (0,600, 15,24mm) |
| Número de pinos | 40 |
| Conversores de dados | A/D 8x10b |
| Número de E/S. | 33 |
| Watchdog Timers | Sim |
| Temperatura operacional | -40°C ~ 85°C ta |
| Embalagem | Tubo |
| Série | Foto® 16f |
| Publicado | 1997 |
| Código JESD-609 | E3 |
| Código PBFree | Sim |
| Status da peça | Ativo |
| Nível de sensibilidade à umidade (MSL) | 1 (ilimitado) |
| Número de terminações | 40 |
| Código ECCN | Ear99 |
| Acabamento terminal | Matte Tin (SN) - recozido |
| Recurso adicional | Opera com suprimento mínimo de 4V |
| Posição terminal | DUAL |
| Tensão de fornecimento | 5V |
| Freqüência | 20MHz |
| Número da peça base | PIC16F877A |
| Contagem de pinos | 40 |
| Tensão de fornecimento-max (vsup) | 5.5V |
| Fontes de alimentação | 5V |
| Tensão de fornecimento-min (vsup) | 4.5V |
| Interface | I2C, SPI, SSP, UART, USART |
| Tamanho da memória | 14kb |
| Tipo de oscilador | Externo |
| Corrente de fornecimento nominal | 1.6mA |
| Tamanho da RAM | 368 x 8 |
| Tensão - suprimento (VCC/VDD) | 4V ~ 5,5V |
| UPS/UCS/ICS periférico | Microcontrolador, RISC |
| Processador principal | Foto |
| Periféricos | Detecto/redefinição de Brown-out, POR, PWM, WDT |
| Tipo de memória do programa | CLARÃO |
| Tamanho do núcleo | 8 bits |
| Tamanho da memória do programa | 14kb (8k x 14) |
| Conectividade | I2C, SPI, UART/USART |
| Tamanho do bit | 8 |
| Tempo de acesso | 20 µs |
| Tem adc | Sim |
| Canais DMA | Não |
| Data Bus Largura | 8b |
| Número de temporizadores/contadores | 3 |
| Endereço de largura do barramento | 8b |
| Densidade | 112 KB |
| Tamanho da EEPROM | 256 x 8 |
| Família da CPU | Foto |
| Número de canais ADC | 8 |
| Número de canais PWM | 2 |
| Número de canais I2C | 1 |
| Altura | 4,06mm |
| Comprimento | 52,45mm |
| Largura | 14,22mm |
| Alcance SVHC | Sem svhc |
| Endurecimento da radiação | Não |
| Status do ROHS | ROHS3 compatível |
| Chumbo livre | Chumbo livre |
Entendendo os motores de passo
Um motor de passo é um tipo de motor elétrico que se move em etapas específicas, e não em movimento contínuo como os motores tradicionais.Esses movimentos passo a passo são medidos em graus, que podem variar dependendo do aplicativo.
Os motores de passo podem operar em diferentes modos: acionamento de onda, acionamento completo e meia tração.Cada modo controla como as fases do motor são energizadas, afetando seu desempenho e tornando -o adequado para vários usos.
No modo de acionamento de ondas, apenas uma fase do motor é alimentada por vez.Esse modo de controle simples é útil para situações em que a eficiência de energia é priorizada sobre o torque, como nas tarefas básicas de automação, onde é necessária uma corrente de partida mínima.
O modo de unidade completo alimenta duas fases simultaneamente.Isso resulta em maior saída de torque, pois duas bobinas funcionam juntas, tornando -o ideal para aplicações onde precisão e força são necessárias, como nas máquinas de robótica e CNC.
A metade do modo de acionamento combina os recursos da onda e da unidade completa, energizando alternadamente uma fase e duas fases.Essa abordagem fornece tamanhos de etapas menores, dobrando efetivamente a resolução do motor.A meia tração é mais adequada para aplicações como impressão 3D e instrumentação fina, onde o movimento suave e o posicionamento preciso são essenciais.
Ao escolher um motor de passo para uso específico, considere o ambiente operacional.Para tarefas de alta precisão, o modo de metade de acionamento é recomendado para garantir transições suaves e vibrações reduzidas.Para projetos focados na economia de energia, o modo de acionamento de ondas pode ser mais apropriado.
A seleção do modo correto requer fatores de equilíbrio, como torque, velocidade e complexidade do sistema.A escolha do modo correto pode influenciar significativamente o desempenho do motor e a eficiência geral do seu sistema.
Conectando um motor de passo com pic16f877a
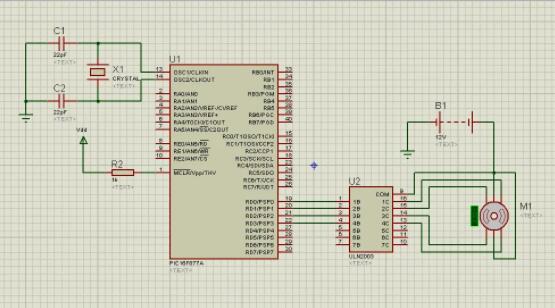
Para conectar um motor de passo com um PIC16F877A Microcontrolador, você pode usar a matriz de transistor ULN2003.Este circuito integrado, projetado para motores de alto torque, contém sete pares de Darlington.Os bits Portd inferior do microcontrolador estão ligados aos pinos de entrada (1b, 2b, 3b, 4b) do ULN2003, enquanto seus pinos de saída (1C, 2C, 3C, 4C) se conectam aos pinos do motor de passo.Os pinos comuns do motor e o pino COM do ULN2003 estão conectados a uma fonte de alimentação de 12V.
Os motores de passo são comumente usados para aplicações que requerem controle preciso de movimento.Eles convertem pulsos digitais em rotação mecânica, tornando -os ideais para dispositivos como máquinas CNC e impressoras 3D, onde a posição e a velocidade devem ser cuidadosamente regulamentadas.
O ULN2003 desempenha um papel fundamental no controle dos motores de passo devido à sua capacidade de lidar com alta corrente e sua fácil interface com os microcontroladores.Quando conectados ao PIC16F877A, os bits de portd inferiores são usados para controlar o motor de passo.Essa configuração fornece controle preciso da etapa, garantindo movimento e posicionamento precisos.
O uso do ULN2003 nas configurações de controle do motor é altamente confiável em aplicativos do mundo real.Ajuda a minimizar problemas como etapas perdidas ou posicionamento incorreto, melhorando o desempenho geral.Manutenção e calibração regulares com base nos dados de uso podem otimizar ainda mais a função do motor, garantindo estabilidade a longo prazo e operação precisa.
Ajustando a velocidade do motor de passo
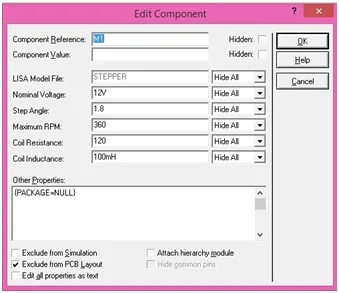
A velocidade do motor de passo pode ser modificada com precisão usando o software de simulação de proteus.Acessando as configurações do motor através de 'Propriedades de edição' 'Ajustes a parâmetros como o número de etapas e o ângulo de etapas podem ser feitos.Por exemplo, um motor de 200 etapa divide uma rotação completa (360 °) em 200 etapas, renderizando cada etapa 1,8 °.A alteração dessas configurações no Proteus refletirá dinamicamente durante a simulação.
Na prática, os motores de passo são frequentemente empregados em indústrias onde o controle preciso do movimento é crucial, como em máquinas e robótica CNC.Ajustando o ângulo da etapa e o número de etapas ajustam o motor para alcançar o movimento exato necessário para tarefas específicas.
A alteração dos parâmetros do motor de passo afeta as características de desempenho, como torque e resolução.Por exemplo, aumentar o número de etapas geralmente aumenta a resolução, mas pode afetar o tempo de torque e resposta.Compreender essas trade-offs por meio da simulação ajuda a tomar decisões informadas.
Uma perspectiva diferenciada revela que os ajustes iterativos, seguidos de ensaios práticos, levam a um design mais robusto do motor.Garantir que as simulações digitais espelhem de perto os resultados do mundo real seja fundamental.As nuances de configurar um motor de passo estão de fato em encontrar um equilíbrio entre precisão teórica e viabilidade prática.
Programando um motor de passo com PIC16F877A
Esta seção abrange como programar um motor de passo usando o microcontrolador PIC16F877A, explicando diferentes modos de direção e fornecendo orientação prática para uma implementação eficaz.
Aqui está um código de exemplo básico para demonstrar o controle do motor de passo usando o modo de unidade completo:
void main ()
{
TRISD = 0B00000000;// Defina o portd como saída
Portd = 0B11111111;// inicialize portd
fazer
{
PORTD = 0B00000011;// energiza duas fases simultaneamente
Touch_ms (500);// atraso de 0,5 segundos
PORTD = 0B00000110;
Touch_ms (500);
PORTD = 0B00001100;
Touch_ms (500);
PORTD = 0B00001001;
Touch_ms (500);
} while (1);// loop indefinidamente
}
Neste código, o portd do PIC16F877A é configurado como uma porta de saída para controlar o motor de passo através do driver ULN2003.A sequência de comandos energiza duas fases do motor de passo por vez, o que é característico do modo de acionamento completo.Este modo mantém o rotor em uma posição fixa com torque máximo, mas normalmente consome mais energia.
O modo de unidade completo não é a única maneira de controlar os motores de passo.Os modos de acionamento de ondas e meia tração fornecem alternativas com base em requisitos específicos.A unidade de onda energiza apenas uma fase de cada vez, o que reduz o consumo de energia, mas resulta em menor torque.A metade de acionamento alterna entre uma e duas fases, oferecendo uma resolução mais alta e movimento mais suave.
Ao programar os motores de passo, escolha o modo de condução que melhor se adapte às suas necessidades, seja para posicionamento preciso, eficiência de energia ou torque máximo.
Aplicações práticas de motores de passo
Os motores de passo são amplamente utilizados em muitos setores devido à sua capacidade de fornecer controle preciso e desempenho confiável.Sua versatilidade os torna adequados para tudo, desde carros e eletrodomésticos a máquinas industriais e dispositivos médicos.
No mundo automotivo, os motores de passo desempenham um papel fundamental no controle de sistemas como o acelerador, os faróis e o ar condicionado.Eles ajudam a ajustar esses componentes, garantindo que os veículos funcionem de maneira tranquila e eficiente.Enquanto isso, em equipamentos de escritório, como impressoras e fotocopiadoras, os motores de passo lidam com tarefas como alimentação de papel e colocação de tinta.Essa precisão garante qualidade de impressão consistente e operação suave ao longo do tempo.
Em casa, aparelhos como máquinas de lavar e lavadores de louça dependem de motores de passo para controlar o fluxo de água e a rotação do tambor, garantindo que tudo funcione perfeitamente.Em ambientes industriais, os motores de passo são cruciais para operar máquinas CNC e braços robóticos, onde fornecem os movimentos exatos necessários para a fabricação de alta precisão.
Os sistemas de segurança também se beneficiam do movimento confiável dos motores de passo.Em dispositivos como câmeras de vigilância e bloqueios automatizados, os motores de passo permitem o posicionamento suave e preciso, essencial para o monitoramento e a segurança eficazes.Na área da saúde, os motores de passo são usados em dispositivos médicos, como bombas de infusão e equipamentos de imagem, onde oferecem o controle preciso necessário para uma operação segura e precisa.
À medida que a tecnologia continua a evoluir, os motores de passo devem encontrar ainda mais aplicações em campos emergentes, como robótica e veículos autônomos.Seu desenvolvimento contínuo provavelmente levará a uma precisão e eficiência ainda maiores, expandindo seu papel em várias indústrias.
Peças de microcontrolador comparáveis
| Número da peça | PIC16F877A-I/P. | Pic16f77-i/p | PIC16F74-I/P. | PIC16F777-I/P. |
| Fabricante | Microchip Technology | Microchip Technology | Microchip Technology | Microchip Technology |
| Pacote / caso | 40-DIP (0,600, 15,24mm) | 40-DIP (0,600, 15,24mm) | 40-DIP (0,600, 15,24mm) | 40-DIP (0,600, 15,24mm) |
| Número de pinos | 40 | 40 | 40 | 40 |
| Data Bus Largura | 8 b | 8 b | 8 b | 8 b |
| Número de E/S. | 33 | 33 | 33 | 36 |
| Interface | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, UART, USART |
| Tamanho da memória | 14 kb | 7 KB | 14 kb | 14 kb |
| Tensão de fornecimento | 5 v | 5 v | 5 v | 5 v |
| Periféricos | Detecto/redefinição de Brown-out, POR, PWM, WDT | Detecto/redefinição de Brown-out, POR, PWM, WDT | Detecto/redefinição de Brown-out, POR, PWM, WDT | Detecto/redefinição de Brown-out, POR, PWM, WDT |
| Ver compare | PIC16F877A-I/P. Vs. Pic16f77-i/p | PIC16F877A-I/P. Vs. Pic16f77-i/p | PIC16F877A-I/P. Vs. PIC16F74-I/P. | PIC16F877A-I/P. Vs. PIC16F777-I/P. |
Perguntas frequentes [FAQ]
1. O que um motor de passo usa para gerar movimento mecânico?
Um motor de passo gera movimento mecânico usando pulsos elétricos.
2. O que um motor de passo faz?
Um motor de passo se move em etapas discretas.
3. Como os motores de passo são medidos?
Os motores de passo são medidos em graus.
4. Quantas etapas um motor de passo leva?
Um motor de passo se move um passo de cada vez.
5. Quantos modos de excitação um motor de passo tem?
Um motor de passo possui três modos de excitação.
6. Qual é a maneira mais simples de conectar um motor de passo?
A maneira mais simples é conectá -lo a um microcontrolador PIC16F877A.
7. Quantos pinos de entrada do ULN2003 estão conectados aos bits mais baixos significativos do portd do microcontrolador?
Quatro pinos de entrada estão conectados aos bits mais baixos significativos do portd do microcontrolador
Sobre Nós
ALLELCO LIMITED
Consulte Mais informação
Inquérito rápido.
Por favor, envie uma consulta, responderemos imediatamente.
Por que escolher o chip de memória ADESTO RM25C64DS-LTAI-B para o seu projeto?
em 10/10/2024
PC817 Optocoupler: funcionalidade e aplicações modernas
em 10/10/2024
Postagens populares
-
O que é GND no circuito?
em 01/01/1970 2838
-

Guia do conector RJ-45: Códigos de cores do conector RJ-45, esquemas de fiação, aplicativos R-J45, folhas de dados RJ-45
em 01/01/1970 2410
-

Tipos de conector de fibra: SC vs LC e LC vs MTP
em 01/01/1970 2020
-
Entendendo tensões da fonte de alimentação em eletrônicos VCC, VDD, VEE, VSS e GND
em 05/11/0400 1766
-

Comparação entre DB9 e RS232
em 01/01/1970 1727
-

O que é uma bateria LR44?
A eletricidade, essa força onipresente, permeia silenciosamente todos os aspectos de nossas vidas diárias, desde aparelhos triviais até equipamentos médicos com risco de vida, ela desempenha um papel silencioso.No entanto, entender verdadeiramente essa energia, especialmente como armazenar e gerá -la com eficiência, não é uma tarefa fácil.É nesse contexto que este artigo se concentrará ...em 01/01/1970 1680
-
Compreendendo os fundamentos: resistência à indutância e capacitância
Na intrincada dança da engenharia elétrica, um trio de elementos fundamentais leva o centro do palco: indutância, resistência e capacitância.Cada um possui características únicas que ditam os ritmos dinâmicos dos circuitos eletrônicos.Aqui, embarcamos em uma jornada para decifrar as complexidades desses componentes, para descobrir seus papéis distintos e usos práticos dentro da vasta or...em 01/01/1970 1622
-

Guia abrangente da bateria CR2430: Especificações, aplicações e comparação com baterias CR2032
O que é a bateria CR2430?Benefícios das baterias CR2430NormaAplicações de bateria CR2430CR2430 equivalenteCR2430 vs CR2032Tamanho da bateria CR2430O que procurar ao comprar o CR2430 e equivalentesFolha de dados PDFPerguntas frequentes As baterias são o coração de pequenos dispositivos eletrônicos.Entre os muitos tipos disponíveis, as células da moeda desempenham um papel crucial, comumen...em 01/01/1970 1495
-

CR2450 vs CR2032: A bateria pode ser usada?
As baterias de lítio de manganês têm algumas semelhanças com outras baterias de lítio.Alta densidade de energia e vida útil longa são as características que eles têm em comum.Esse tipo de bateria ganhou a confiança e o favor de muitos consumidores por causa de sua segurança única.Gadgets de tecnologia caros?Pequenos aparelhos em nossas casas?Olhe em volta e você os verá em todos os l...em 01/01/1970 1471
-
O que é RF e por que o usamos?
A tecnologia de radiofrequência (RF) é uma parte essencial da comunicação sem fio moderna, permitindo a transmissão de dados em longas distâncias sem conexões físicas.Este artigo investiga o básico da RF, explicando como a radiação eletromagnética (EMR) torna possível a comunicação de RF.Exploraremos os princípios do EMR, a criação e o controle dos sinais de RF e seus usos abrang...em 01/01/1970 1454
Número da peça quente
-

5749111-8
TE Connectivity AMP Connectors
CONN D-TYPE PLUG 100POS IDC
AUIRF4905S
Infineon Technologies
MOSFET P-CH 55V 42A D2PAK
UMK316B7224KLHT
Taiyo Yuden
CAP CER 0.22UF 50V X7R 1206
FMC3AT148
Rohm Semiconductor
TRANS NPN/PNP PREBIAS 0.3W SMT5
SM8S43ATHE3/I
Vishay General Semiconductor - Diodes Division
TVS DIODE 43VWM 69.4VC DO218AC
CSTNE8M00G520000R0
Murata Electronics
CERAMIC RES 8.0000MHZ 10PF SMD
MAX9024AUD
Analog Devices Inc./Maxim Integrated
IC COMPARATOR 4 GEN PUR 14TSSOP
C1608X7R1V334M080AB
TDK Corporation
CAP CER 0.33UF 35V X7R 0603
C2012X5R2E332M085AA
TDK Corporation
CAP CER 3300PF 250V X5R 0805
TSV911AIYLT
STMicroelectronics
IC OPAMP GP 1 CIRCUIT SOT23-5
XCR3512XL-10FT256C
AMD
IC CPLD 512MC 9NS 256FTBGA
AD5405YCPZ-REEL7
Analog Devices Inc.
IC DAC 12BIT A-OUT 40LFCSP
MMBZ5242B
onsemi
ZENER DIODE, 12V V(Z), 5%, 0.35W
STU5N52K3
STMicroelectronics
MOSFET N-CH 525V 4.4A IPAK
STD19NF20
STMicroelectronics
MOSFET N-CHANNEL 200V 15A DPAK
TMP709SNDBVR
Texas Instruments
PROTOTYPE
MBRD360T4G
onsemi
DIODE SCHOTTKY 60V 3A DPAK
XCZU5EV-1SFVC784I
AMD
IC SOC CORTEX-A53 784FCBGA -
LMK105BJ224KV-F
Taiyo Yuden
CAP CER 0.22UF 10V X5R 0402
MIC37101-1.5YM
Microchip Technology
IC REG LINEAR 1.5V 1A 8SOIC
RL1220S-1R5-G
Susumu
RES SMD 1.5 OHM 2% 1/3W 0805
1N5352B
NTE Electronics, Inc
DIODE ZENER 15V 5W AXIAL
SA33A-E3/73
Vishay General Semiconductor - Diodes Division
TVS DIODE 33VWM 53.3VC DO204AC
LT1120ACN8
Analog Devices Inc.
IC REG LINEAR POS ADJ 125MA 8DIP
NUF2114MNT1G
onsemi
FILTER RC(PI) 9 OHM/60PF ESD SMD
NCV562SQ33T1G
onsemi
IC REG LINEAR 3.3V 80MA SC82AB
RT8008-33GJ5
Richtek USA Inc.
IC REG BUCK 3.3V 600MA TSOT23-5
BZT52C22-E3-08
Vishay General Semiconductor - Diodes Division
DIODE ZENER 22V 410MW SOD123
GRM1555C1H3R4CA01D
Murata Electronics
CAP CER 3.4PF 50V C0G/NP0 0402
REG102GA-3.3/2K5
Texas Instruments
IC REG LIN 3.3V 250MA SOT223-6
TL714CD
Texas Instruments
IC COMPARATOR 1 DIFF 8SOIC
LQG18HN4N7S00D
Murata Electronics
FIXED IND 4.7NH 450MA 200MOHM SM
R5010815XXWA
Powerex Inc.
DIODE GP REV 800V 150A DO205AA
293D476X9016D2TE3
Vishay Sprague
CAP TANT 47UF 10% 16V 2917
XC6216B332ER-G
Torex Semiconductor Ltd
IC REG LINEAR 3.3V 150MA 6USPC
TMK063CG8R2DP-F
Taiyo Yuden
CAP CER 8.2PF 25V C0G/NP0 0201 -

XCS30XL-4VQ100C
AMD
IC FPGA 77 I/O 100VQFP
ADUM4190SRIZ-RL
Analog Devices Inc.
IC ISOLATOR 16SOIC
BZG03C12TR
Vishay General Semiconductor - Diodes Division
DIODE ZENER 12V 3W DO214AC
TS3USB30EDGSR
Texas Instruments
IC USB SWITCH SGL 1X2 10MSOP
TRSF3223EIPW
Texas Instruments
IC TRANSCEIVER FULL 2/2 20TSSOP
SR23_R1_00001
Panjit International Inc.
DIODE SCHOTTKY 30V 2A SMA
XC9536XL-10VQG64I
AMD
IC CPLD 36MC 10NS 64VQFP
MAX2654EXT+T
Analog Devices Inc./Maxim Integrated
IC AMP GPS 1.4GHZ-1.7GHZ SC70-6
MCR01MZPJ153
Rohm Semiconductor
RES SMD 15K OHM 5% 1/16W 0402
FAN3111ESX
onsemi
IC GATE DRVR LOW-SIDE SOT23-5
MPC8241LZQ200D
Freescale Semiconductor
RISC MICROPROCESSOR, 32 BIT, PO
1206SC122KAT2A
KYOCERA AVX
CAP CER 1200PF 1.5KV X7R 1206
CY28RS480ZXCT
Infineon Technologies
IC CLK GEN CPU 200MHZ 2CIRC
ACS755LCB-130-PFF
Allegro MicroSystems
SENSOR CURRENT HALL 130A DC
MP23ABS1TR
STMicroelectronics
MIC MEMS ANALOG OMNI -38DB
BA4584YFV-MGE2
Rohm Semiconductor
IC OPAMP GP 4 CIRCUIT 14SSOPB
1812SA561JAT3A
KYOCERA AVX
CAP CER 560PF 1.5KV C0G/NP0 1812
GRM2196P2A7R2DZ01D
Murata Electronics
CAP CER 7.2PF 100V P2H 0805