L298N Motor Drivers: Recursos, diagramas de circuito e aplicações
Catálogo
Introdução ao L298N
L298N é uma versão vertical do pacote do L298.É um chip de motorista de motor de ponte de canal duplo que pode aceitar alta tensão e alta corrente.Sua tensão de trabalho pode atingir 46V e sua corrente máxima de saída é 4a.Além disso, o L298N também possui dois terminais de controle de ativação.Esses terminais de controle permitem que o modo de trabalho do circuito seja ajustado dinamicamente, conectando e desconectando o jumper a bordo sem ser interferido pelo sinal de entrada.O L298N está equipado com uma entrada de energia lógica, que permite que a parte interna do circuito lógico opere em baixa tensão.Ao mesmo tempo, também pode gerar uma tensão lógica de 5V externamente.Para evitar danos ao chip estabilizador de tensão, ao usar uma tensão de acionamento superior a 12V, é fortemente recomendável usar uma interface externa de 5V para fonte de alimentação independente.
O L298N controla o terminal de entrada de E/S no chip de controle principal e ajusta a tensão de saída diretamente através da fonte de alimentação para realizar a frente, a reversão e a parada do motor.Normalmente, o L298N pode acionar relés diretamente (quatro vias), solenóides, válvulas solenóides, dois motores CC e um motor de passo (bifásica ou quatro fases).
Alternativas e equivalentes:
• E-L298N
• L298HN
• LM18298T
Recursos funcionais de L298N
Compatibilidade de entrada lógica: A entrada lógica de L298N é compatível com TTL, CMOs e outros níveis lógicos.
Proteção de superaquecimento: L298N tem superaquecimento da função de proteção.Quando a temperatura do chip estiver muito alta, ele desconectará automaticamente a saída.
Diodo de polaridade livre embutida: L298N possui um diodo de polaridade livre embutido, que pode ser usado para a frenagem de motores CC.
Grande saída de corrente: L298N pode fornecer grande corrente de saída e é adequado para alguns aplicativos que requerem grande corrente de direção.
Estrutura dupla de ponte H: L298N integra uma estrutura dupla de ponte H, que pode controlar a direção e a velocidade de dois motores CC ou motores de passo.
Diagrama do circuito L298N
O diagrama de circuito de L298n é o seguinte:
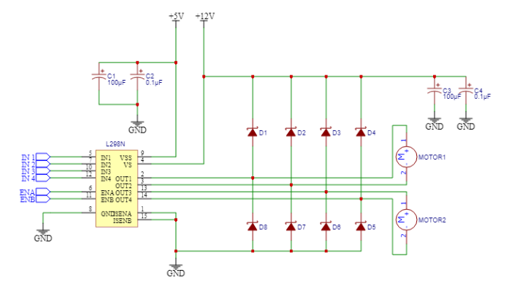
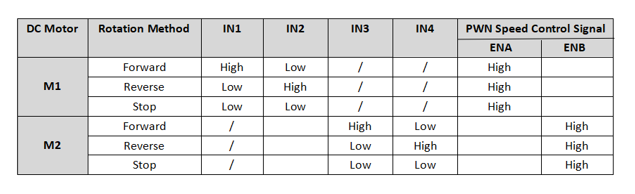
Out1, out2 e out3, out4 estão conectados ao motor1, motor2;In1, IN2, IN3, IN4 pinos do microcontrolador para acessar o nível de controle, para controlar o motor para frente e reverso;ENA, ENB conectado ao controle do terminal de ativação, para controlar a velocidade do motor.O diagrama de relacionamento lógico de controle L298N é o seguinte:
Em relação à regulação da velocidade do motor, adotamos o método de regulação da velocidade do PWM.O princípio está na realização da regulação da velocidade, controlando o tempo de condução t do tubo de comutação em um ciclo.A tensão média u através do motor durante um ciclo completa t pode ser expressa como u = vcc × (t/t) = a × vcc.Onde, a = t/t, é conhecido como ciclo de trabalho e VCC representa a tensão de alimentação.A velocidade do motor é proporcional à tensão através do motor, enquanto a tensão através do motor é proporcional ao ciclo de trabalho da forma de onda de controle.Portanto, existe uma relação proporcional entre a velocidade do motor e o ciclo de trabalho: quanto maior o ciclo de trabalho, mais rápida a velocidade do motor.
Método de controle de L298N
Ao usar o L298N, precisamos inserir sinais de controle para IN1, IN2, IN3 e IN4 para controlar a rotação e a velocidade do motor para frente e reversa.Aqui estão vários métodos de controle:
Modo de controle PWM
O modo PWM pode efetivamente controlar a velocidade do motor.Ao usar o modo PWM, precisamos usar os dois pinos EN1 e EN2 para ajustar a velocidade do motor.Especificamente, quando os pinos EN1 e EN2 estão em alto nível, o motor opera normalmente;Quando estão em nível baixo, o motor para de girar.
Modo de controle unidirecional
Quando IN1, IN2, IN3 e IN4 são de alto nível ao mesmo tempo, o motor gira para a frente;Quando quaisquer duas portas de entrada são de alto nível e as outras duas portas de entrada são de baixo nível, o motor gira reversamente.
Modo de controle bidirecional
Ao usar o modo de controle bidirecional, IN1 e IN2 são responsáveis pelo controle do motor 1, enquanto IN3 e IN4 são responsáveis pelo controle do motor 2. Especificamente, quando IN1 é alto nível e IN2 é de baixo nível, o motor 1 girará para a frente;Por outro lado, quando IN1 está baixo e IN2 é de alto nível, o motor 1 gira reversa.Da mesma forma, a lógica de controle de IN3 e IN4 também é aplicável ao controle de rotação direta e reversa do motor 2.
Diagrama de pinos e funções de L298N
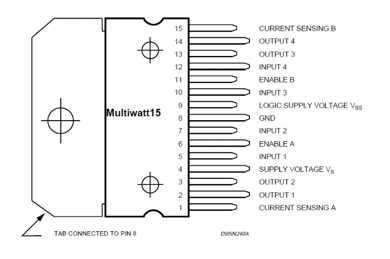
Pino de potência
Vs: entrada de tensão de alimentação (até 46V)
GND: pino moído
Pino de controle lógico
In1, in2: usado para controlar a direção de rotação do motor 1
In3, in4: usado para controlar a direção de rotação do motor 2
Pino de controle do motor:
Out1, out2: usado para controlar a direção do motor 1
Out3, out4: usado para controlar a direção do motor 2
ENA: Ativar pino, usado para controlar a velocidade do motor 1
ENB: Ativar pino, usado para controlar a velocidade do motor 2
Como usar o L298N?
Conecte a fonte de alimentação: a fonte de alimentação do módulo de driver L298N deve ser mantida na faixa de 12V a 35V.Em aplicações práticas, para garantir a estabilidade da fonte de alimentação, também podemos precisar filtrar a fonte de alimentação.
Conecte os motores: conectamos os dois motores aos pinos de saída do L298N através do driver, e o nível de controle é diretamente inserido no motor através do L298N.
Control L298N: Usamos a porta de controle (Ativar, pino de controle) para controlar o L298N.Precisamos definir o status da porta Ativar e do pino de controle ao atribuir valores.Esses status determinarão o status de nível da saída L298N.Ao alterar esses estados, podemos controlar efetivamente a rotação e a velocidade reversa e a velocidade do motor.
Como usar o PWM para regular a velocidade do motor?
Se queremos usar o PWM para regular a velocidade do motor, temos dois métodos de fiação:
Método de fiação um (recomendado):
Removemos a tampa do jumper entre o canal Ativa e 5V, conectamos o pino de ativação ao pino PWM do Arduino e conectamos os pinos 1 e 2 aos dois pinos normais do Arduino.Dessa forma, podemos controlar a troca do canal através do pino PWM para ajustar a velocidade do motor;Ao controlar o status de nível dos pinos 1 e 2, podemos controlar a direção de rotação do motor.Essa maneira de fiação requer apenas o uso de um pino PWM por canal, mas ocupa dois pinos normais.Portanto, em aplicações práticas, precisamos pesar e escolher entre vários métodos de fiação com base no número de pinos disponíveis no Arduino.
Método de fiação dois (não recomendado):
Não removemos o jumper entre a habilitação do canal e o 5V, portanto o canal permanecerá continuamente aberto.Em seguida, conectamos os pinos 1 e 2 às duas interfaces PWM de Arduino, respectivamente.Ao controlar as saídas correspondentes a esses dois pinos, respectivamente, podemos controlar a direção e a velocidade da rotação do motor.Obviamente, esse método de fiação ocupará mais pinos PWM, porque cada canal requer dois pinos PWM para controlar.No entanto, esse método não ocupa pinos comuns.Portanto, não recomendamos o uso deste esquema de fiação quando os recursos do PWM PIN estão apertados.
Onde o L298n é usado?
Veículos elétricos: L298N pode ser usado para controlar os motores de acionamento em veículos elétricos, como bicicletas elétricas, scooters, etc. Por exemplo, em bicicletas, controlando com precisão a velocidade de rotação e a direção do motor, L298N pode obter aceleração, desaceleração e desaceleração edirigir estável de bicicletas elétricas.O ciclista pode transmitir instruções para o L298N, operando a alça ou os botões, controlando assim a saída do motor para fazer a unidade de bicicleta de acordo com os desejos do piloto.
Equipamento industrial automatizado: No campo da automação industrial, L298N pode ser usado para controlar os motores de vários equipamentos industriais, como cintos de transportadores, braços robóticos, robôs industriais etc. Por exemplo, no braço robótico, o L298N controla com precisão oângulo de rotação e velocidade do motor, permitindo que o braço robótico se mova de acordo com uma trajetória predeterminada e obtenha operação de alta precisão.Isso não apenas melhora a eficiência da produção, mas também reduz as perdas de produção causadas por erros operacionais.
Tecnologia do robô: o L298N é frequentemente usado em projetos de robôs para controlar o motor de acionamento para realizar o movimento e a ação do robô.Os robôs industriais geralmente precisam realizar trabalhos pesados e de alta precisão e ter requisitos extremamente altos nos motores de acionamento.O L298N fornece um poderoso suporte de energia para robôs industriais com sua excelente capacidade de direção e estabilidade.Seja manuseio, montagem ou inspeção, o L298N pode garantir que os robôs industriais concluam tarefas com precisão e eficiência.
Smart Home: Em Smart Home Systems, o L298N pode ser usado para controlar os motores de persianas, cortinas, portas e outros equipamentos para obter controle automatizado.Ao combinar com sensores, o equipamento doméstico pode ser ajustado automaticamente de acordo com a iluminação, a temperatura e outras condições.
Sistema de rastreamento solar: nos sistemas solares, L298N pode ser usado para controlar o ângulo de inclinação dos painéis solares para implementar um sistema de rastreamento solar.Através do controle do L298N, o sistema de rastreamento solar pode sentir as mudanças de posição do sol em tempo real e ajustar o ângulo de inclinação dos painéis solares de acordo.Esse processo de ajuste dinâmico garante que os painéis solares sempre mantenham o ângulo ideal ao sol, melhorando assim a eficiência da coleta de energia dos painéis solares.
Perguntas frequentes [FAQ]
1. Pode L298N Velocidade de controle?
O L298N é um motorista de motor de ponte H dupla que permite o controle de velocidade e direção de dois motores CC ao mesmo tempo.
2. Por que meu L298N não está funcionando?
Deve estar acima de 4.5V para operação correta do L298.2. Você perderá talvez 2,5V em todo o L298.Talvez não restem mais tensão suficiente para executar o motor.
3. O que é o L298N?
O motorista do motor L298N é um controlador que usa uma ponte H para controlar facilmente a direção dos motores e o PWM para controlar a velocidade.Este módulo permite gerenciar independentemente dois motores de até 2a cada um em ambas as direções.A faixa de suprimento pode variar entre 5V e 35V, o suficiente para a maioria dos projetos de motor DC.
4. Podemos conectar 4 motores a L298N?
A resposta é sim e não. Depende de como você usa o motorista do motor L298N.O L298N foi originalmente projetado para controlar dois motores CC ou um motor de passo.Mas, se você não quiser que cada motor gire para trás, poderá usar cada lado do driver L298N para controlar dois motores CC e um total de 4 motores.
Sobre Nós
ALLELCO LIMITED
Consulte Mais informação
Inquérito rápido.
Por favor, envie uma consulta, responderemos imediatamente.

STWD100NYWY3F Especificações e características operacionais, exemplos de aplicativos em sistemas de microprocessador
em 29/08/2024

IR2104 Guia abrangente: Drivers de Half Bridge de alto desempenho
em 29/08/2024
Postagens populares
-
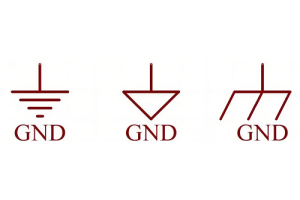
O que é GND no circuito?
em 01/01/1970 2956
-

Guia do conector RJ-45: Códigos de cores do conector RJ-45, esquemas de fiação, aplicativos R-J45, folhas de dados RJ-45
em 01/01/1970 2511
-

Tipos de conector de fibra: SC vs LC e LC vs MTP
em 01/01/1970 2099
-
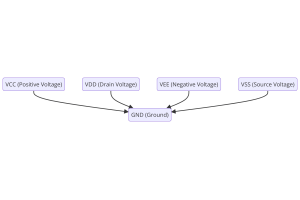
Entendendo tensões da fonte de alimentação em eletrônicos VCC, VDD, VEE, VSS e GND
em 10/11/0400 1912
-

Comparação entre DB9 e RS232
em 01/01/1970 1768
-

O que é uma bateria LR44?
A eletricidade, essa força onipresente, permeia silenciosamente todos os aspectos de nossas vidas diárias, desde aparelhos triviais até equipamentos médicos com risco de vida, ela desempenha um papel silencioso.No entanto, entender verdadeiramente essa energia, especialmente como armazenar e gerá -la com eficiência, não é uma tarefa fácil.É nesse contexto que este artigo se concentrará ...em 01/01/1970 1717
-
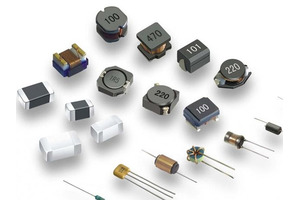
Compreendendo os fundamentos: resistência à indutância e capacitância
Na intrincada dança da engenharia elétrica, um trio de elementos fundamentais leva o centro do palco: indutância, resistência e capacitância.Cada um possui características únicas que ditam os ritmos dinâmicos dos circuitos eletrônicos.Aqui, embarcamos em uma jornada para decifrar as complexidades desses componentes, para descobrir seus papéis distintos e usos práticos dentro da vasta or...em 01/01/1970 1667
-

Guia abrangente da bateria CR2430: Especificações, aplicações e comparação com baterias CR2032
O que é a bateria CR2430?Benefícios das baterias CR2430NormaAplicações de bateria CR2430CR2430 equivalenteCR2430 vs CR2032Tamanho da bateria CR2430O que procurar ao comprar o CR2430 e equivalentesFolha de dados PDFPerguntas frequentes As baterias são o coração de pequenos dispositivos eletrônicos.Entre os muitos tipos disponíveis, as células da moeda desempenham um papel crucial, comumen...em 01/01/1970 1579
-
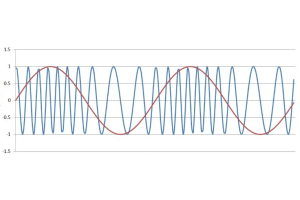
O que é RF e por que o usamos?
A tecnologia de radiofrequência (RF) é uma parte essencial da comunicação sem fio moderna, permitindo a transmissão de dados em longas distâncias sem conexões físicas.Este artigo investiga o básico da RF, explicando como a radiação eletromagnética (EMR) torna possível a comunicação de RF.Exploraremos os princípios do EMR, a criação e o controle dos sinais de RF e seus usos abrang...em 01/01/1970 1553
-

CR2450 vs CR2032: A bateria pode ser usada?
As baterias de lítio de manganês têm algumas semelhanças com outras baterias de lítio.Alta densidade de energia e vida útil longa são as características que eles têm em comum.Esse tipo de bateria ganhou a confiança e o favor de muitos consumidores por causa de sua segurança única.Gadgets de tecnologia caros?Pequenos aparelhos em nossas casas?Olhe em volta e você os verá em todos os l...em 01/01/1970 1522
Número da peça quente
-

BZX84C12
Taiwan Semiconductor Corporation
SOT-23, 300MW, 5%, SMALL SIGNAL
5KP36CA
Diotec Semiconductor
TVS D8X7.5 36V 5000W BI
LQP03HQ1N1W02D
Murata Electronics
FIXED IND 1.1NH 1.1A 40MOHM SMD
M29W256GH7AN6E
Micron Technology Inc.
IC FLASH 256MBIT PARALLEL 56TSOP
VI-JWY-EX
Vicor Corporation
DC DC CONVERTER 3.3V 50W
0603YC222MAT2A
KYOCERA AVX
CAP CER 2200PF 16V X7R 0603
ADC128S102WGRQV
Texas Instruments
RADIATION-HARDENED, EIGHT-CHANNE
1N4740A-T
Diodes Incorporated
DIODE ZENER 10V 1W DO41
CC0402JRNPO7BN391
Yageo
CAP CER 390PF 16V NPO 0402
MAX4522CSE+T
Analog Devices Inc./Maxim Integrated
IC SW SPST-NOX4 100OHM 16SOIC
ADR03BRZ-REEL7
Analog Devices Inc.
IC VREF SERIES 0.1% 8SOIC
FQB55N10TM
Fairchild Semiconductor
POWER FIELD-EFFECT TRANSISTOR, 5
TOP253GN
Power Integrations
IC OFFLINE SWITCH FLYBACK 8SMD
12107A680JAT2A
AVX Corporation
CAP CER 68PF 500V NP0 1210
LM2574HVM-5.0
Texas Instruments
IC REG BUCK 5V 500MA 14SOIC
EMK042CG150JC-F
Taiyo Yuden
CAP CER 15PF 16V C0G/NP0 01005
SPC560P40L3BEAAY
STMicroelectronics
IC MCU 32BIT 256KB FLASH 100LQFP
C4532X7R2E334K230KA
TDK Corporation
CAP CER 0.33UF 250V X7R 1812 -

W25Q16DVZPIG
Winbond Electronics
IC FLASH 16MBIT SPI/QUAD 8WSON
VI-251-EU
Vicor Corporation
DC DC CONVERTER 12V 200W
IXFH6N100F
IXYS
MOSFET N-CH 1000V 6A TO247
ULQ2003ADG4
Texas Instruments
IC PWR DRIVER NPN 1:1 16SOIC
SZMM3Z3V6T1G
onsemi
DIODE ZENER 3.6V 300MW SOD323
PIC24EP512GU810-I/PT
Microchip Technology
IC MCU 16BIT 512KB FLASH 100TQFP
DCF010-TL-E
onsemi
DIODE ARRAY GP 80V 100MA 3MCP
EPF10K50RC240-4N
Intel
IC FPGA 189 I/O 240RQFP
MAX8686ETL+T
Analog Devices Inc./Maxim Integrated
IC REG BUCK ADJ 25A 40TQFN
LTC2209IUP
Analog Devices Inc.
IC ADC 16BIT PIPELINED 64QFN
TMK107B7104KAHT
Taiyo Yuden
CAP CER 0.1UF 25V X7R 0603
ADM696ARZ-REEL
Analog Devices Inc.
IC SUPERVISOR 1 CHANNEL 16SOIC
1808N220J302LT
Walsin Technology Corporation
CAP CER 22PF 3KV C0G/NP0 1808
SCP6SMB68AT3G
Littelfuse Inc.
TVS DIODE SMB
NPH15S4812IC
Murata Power Solutions Inc.
DC DC CONVERTER 12.1V 15W
C3216X7R1E475K085AB
TDK Corporation
CAP CER 4.7UF 25V X7R 1206
PIC32MM0256GPM036T-I/MV
Microchip Technology
IC MCU 32BIT 256KB FLASH 40UQFN
74437346015
Würth Elektronik
FIXED IND 1.5UH 7.2A 15 MOHM SMD -

FOD3150SD
onsemi
OPTOISO 5KV 1CH GATE DRIVER 8SMD
TN80C186EB-16
Rochester Electronics, LLC
MICROPROCESSOR, 16-BIT, 16MHZ, C
TLRZ1JTTD
KOA Speer Electronics, Inc.
RES 0 OHM JUMPER 0603
RT1206DRE074K99L
YAGEO
RES SMD 4.99K OHM 0.5% 1/4W 1206
MC33886VWR2
Freescale Semiconductor
STEPPER MOTOR CONTROLLER
PTZTE2536B
Rohm Semiconductor
DIODE ZENER 39.2V 1W PMDS
F2M03GX-S01
Free2Move
RF TXRX MOD BLUETOOTH CHIP SMD
GCM1885C1H5R8DA16D
Murata Electronics
CAP CER 5.8PF 50V C0G/NP0 0603
SY88813VKG
Microchip Technology
IC LIMIT AMP 10MSOP
ATTINY45-20SU
Atmel
IC MCU 8BIT 4KB FLASH 8SOIC
MAX4603EAE+T
Analog Devices Inc./Maxim Integrated
IC SW SPST-NO/NCX4 2.5OHM 16SSOP
ADF4002BCPZ-RL
Analog Devices Inc.
IC CLK/FREQ SYNTH 20LFCSP
SNJ54HC164J
Texas Instruments
54HC164 8-BIT PARALLEL-OUT SERIA
TVB035RSC-L
Littelfuse Inc.
THYRISTOR 35V 400A DO214AA
S9S12VR48AF0VLF
NXP USA Inc.
IC MCU 16BIT 48KB FLASH 48LQFP
AT27C256R-45JC
Microchip Technology
IC EPROM 256KBIT PARALLEL 32PLCC
NCV1117ST18T3G
onsemi
IC REG LINEAR 1.8V 1A SOT223
293D107X0010D2TE3
Vishay Sprague
CAP TANT 100UF 20% 10V 2917