MPU-6050 em ação: Guia prático para configuração, configuração e gerenciamento de ruído
Catálogo
Introdução ao MPU-6050
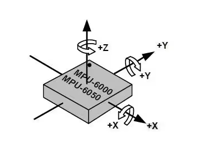
MPU-6050 é o primeiro componente integrado de processamento de movimento de 6 eixos do mundo, que integra um giroscópio de 3 eixos, acelerômetro de 3 eixos e um processador de movimento digital escalável (DMP).O objetivo de usá -lo é obter o ângulo de inclinação do objeto a ser medido (como um quadcopter, um carro de equilíbrio) nos eixos x, y e z, ou seja, o ângulo de inclinação, o ângulo de rolagem e o ângulo da guinada.Lemos os seis dados do MPU-6050 (valor do anúncio de aceleração de três eixos e valor do anúncio angular de três eixos) através da interface I2C.Após o processamento da fusão da postura, os ângulos de afinação, rolagem e guinada podem ser calculados.Como uma referência direcional para os valores de medição, a definição da direção da coordenada do sensor é como mostrado na figura abaixo, que segue o princípio do sistema de coordenadas destro (ou seja, o polegar direito aponta para a direção positiva do x-Eixo, o dedo indicador aponta para a direção positiva do eixo y e o dedo médio aponta para a direção positiva do eixo z).
Com seu barramento de sensor i2C dedicado, o MPU-6050 é capaz de receber a entrada diretamente de uma bússola externa de 3 eixos, fornecendo uma saída completa de 9 eixos MotionFusion ™.Ele elimina o problema da discrepância entre o giroscópio combinado e o cronograma do acelerador e reduz significativamente o espaço de embalagem em comparação com as soluções multi-componentes.Quando conectado a um magnetômetro de três eixos, o MPU-60X0 é capaz de fornecer saída completa de fusão de movimento de 9 eixos para sua porta principal I2C ou SPI (observe que a porta SPI está disponível apenas no MPU-6000).
Alternativas e equivalentes
• MPU-3300
• MPU-6000
• MPU-6500
Fabricante do MPU-6050
O fabricante do MPU-6050 é TDK.Depois que os dois fundadores do TDK, Dr. Yogoro Kato e Takei Takei, inventaram a ferrita em Tóquio, eles fundaram Tokyo Denkikagaku Kogyo K.K.Em 1935. Como marca global da indústria eletrônica, o TDK sempre manteve uma posição dominante nos campos de matérias -primas eletrônicas e componentes eletrônicos.O portfólio de produtos abrangente e orientado a inovação da TDK abrange componentes passivos, como capacitores de cerâmica, capacitores eletrolíticos de alumínio, capacitores de filmes, produtos magnéticos, componentes de alta frequência, dispositivos piezoelétricos e de proteção, bem como sistemas de sensores e sensores (como temperatura e pressão,Sensores magnéticos e MEMS), etc. Além disso, o TDK também fornece fontes de alimentação e dispositivos de energia, cabeças magnéticas e outros produtos.Suas marcas de produtos incluem TDK, EPCOS, Invensense, Micronas, Tronics e TDK-Lambda.
Diagrama de blocos internos do MPU-6050
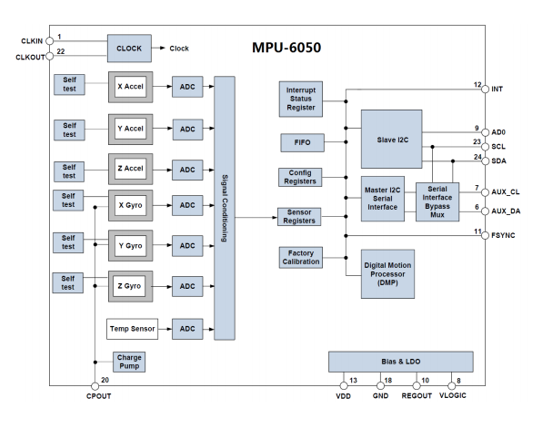
Entre eles, o SCL e o SDA estão as interfaces IIC conectadas ao MCU, e o MCU controla o MPU-6050 através dessa interface IIC.Há também uma interface IIC, nomeadamente aux_cl e aux_da.Essa interface pode ser usada para conectar dispositivos de escravos externos, como sensores magnéticos, para formar um sensor de nove eixos.VLogic é a tensão da porta IO.Este pino pode suportar um mínimo de 1,8V.Geralmente o conectamos diretamente ao VDD.AD0 é o pino de controle de endereço da interface IIC escravo (conectada ao MCU).Este pino controla o bit mais baixo do endereço IIC.Se estiver conectado ao GND, o endereço IIC do MPU-6050 será 0x68;Se estiver conectado ao VDD, é 0x69.Observe que o endereço aqui não inclui o menor bit de transmissão de dados (o bit mais baixo é usado para representar operações de leitura e gravação).No MwBalancedSTC15, o AD0 está conectado ao GND; portanto, o endereço IIC do MPU-6050 é 0x68 (excluindo o bit mais baixo).
Inicialize a interface IIC
O MPU-6050 usa o IIC para se comunicar com o STC15, por isso precisamos inicializar as linhas de dados SDA e SCL conectadas ao MPU-6050 primeiro.
Redefinir MPU-6050
Esta etapa restaura todos os registros dentro do MPU-6050 aos seus valores padrão, que são alcançados escrevendo 1 a bit 7 do registro de gerenciamento de energia 1 (0x6b).Após a redefinição, o registro de gerenciamento de energia 1 será restaurado ao valor padrão (0x40), e esse registro deve ser definido posteriormente como 0x00 para acordar o MPU-6050 e colocá-lo em um estado de trabalho normal.
Defina a faixa em escala completa do sensor de velocidade angular (giroscópio) e sensor de aceleração
Nesta etapa, definimos o intervalo em escala completa (FSR) dos dois sensores através do registro de configuração do giroscópio (0x1b) e o registro de configuração do sensor de aceleração (0x1C), respectivamente.Normalmente, definimos a faixa em escala completa do giroscópio como ± 2000dps e a faixa em escala completa do acelerômetro a ± 2g.
Defina outros parâmetros
Aqui, também precisamos configurar os seguintes parâmetros: desligue as interrupções, desative a interface AUX I2C, desative o FIFO, defina a taxa de amostragem do giroscópio e configure o filtro de passagem baixa digital (DLPF).Como não usamos interrupções para ler dados neste capítulo, a função de interrupção precisa ser desativada.Ao mesmo tempo, como não estamos usando a interface Aux I2C para conectar outros sensores externos, também precisamos fechar essa interface.Essas funções podem ser controladas através do registro de ativação de interrupção (0x38) e registro de controle do usuário (0x6a).O MPU-6050 pode usar o FIFO para armazenar dados do sensor, mas não os usamos neste capítulo, portanto, todos os canais FIFO precisam ser fechados.Isso pode ser controlado através do registro de ativação do FIFO (0x23).Por padrão, o valor deste registro é 0 (ou seja, o FIFO está desativado), para que possamos usar o valor padrão diretamente.A taxa de amostragem do giroscópio é controlada pelo registro do divisor de taxa de amostragem (0x19).Normalmente, definimos essa taxa de amostragem como 50. A configuração do filtro passa-baixa digital (DLPF) é concluída através do Registro de Configuração (0x1a).De um modo geral, definiremos o DLPF como metade da largura de banda para equilibrar a precisão dos dados e a velocidade de resposta.
Configure a fonte do relógio do sistema e ative o sensor de velocidade angular e o sensor de aceleração
A configuração da fonte do relógio do sistema depende do registro de gerenciamento de energia 1 (0x6b), onde os três bits mais baixos deste registro determinam a seleção da fonte do relógio.Por padrão, esses três bits são definidos como 0, o que significa que o sistema usa o oscilador RC de 8MHz interno como fonte do relógio.No entanto, para melhorar a precisão do relógio, geralmente o definimos como 1 e selecionamos o giroscópio PLL do eixo x como a fonte do relógio.Além disso, ativar o sensor de velocidade angular e o sensor de aceleração também é uma etapa importante no processo de inicialização.Ambas as operações são implementadas através do Registro de Gerenciamento de Energia 2 (0x6c).Basta definir o bit correspondente como 0 para ativar o sensor correspondente.Depois de concluir as etapas acima, o MPU-6050 pode inserir o status de trabalho normal.Os registros que não estão especialmente definidos adotarão os valores padrão predefinidos pelo sistema.
Como funciona o MPU-6050?
Sensor de giroscópio
O sensor está equipado com um giroscópio interno, que sempre permanecerá paralelo à direção inicial devido ao efeito giroscópico.Portanto, podemos calcular a direção e o ângulo de rotação detectando o desvio do giroscópio a partir da direção inicial.
Sensor do acelerômetro
Um sensor de acelerômetro é um dispositivo que pode medir a aceleração e funciona com base no princípio do efeito piezoelétrico.Durante a aceleração, o sensor mede a força inercial aplicada ao bloco de massa e calcula o valor da aceleração usando a segunda lei de Newton.
Processador de movimento digital (DMP)
O DMP é um módulo de processamento de dados no chip MPU6050 que possui um algoritmo de filtragem Kalman embutido para adquirir dados do giroscópio e sensores de acelerômetro e processando os quaternions de saída.Esse recurso reduz bastante a carga de trabalho do microprocessador periférico e evita o tedioso processo de filtragem e fusão de dados.
Notas:
Quaternions: Quaternions são números simples de supercomplexos.Números complexos são compostos de números reais mais a unidade imaginária I, onde i^2 = -1.
Onde o MPU-6050 é usado?
• brinquedos
• aparelho e jogos portáteis
• Controladores de jogo baseados em movimento
• Tecnologia BlurFree ™ (para estabilização de vídeo/imagem parada)
• Tecnologia Airsign ™ (para segurança/autenticação)
• Reconhecimento de gestos instanture ™ IG ™
• Sensores vestíveis para saúde, fitness e esportes
• Estrutura de jogo e aplicativo habilitados para movimento
• MotionCommand ™ Technology (para atalhos de gestos)
• Serviços baseados em localização, pontos de interesse e acerto de contas mortos
• Controles remotos 3D para DTVs conectados à Internet e caixas de decópio, camundongos 3D
• Touchanywhere ™ Technology (para “No Touch” Application Control/Navigation)
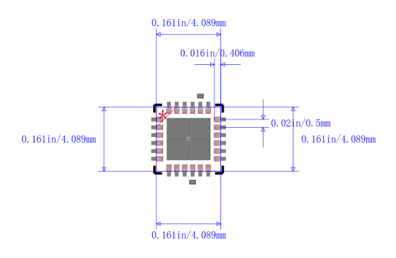
Pacote de MPU-6050
Como reduzir o ruído do MPU-6050?
Podemos tomar as seguintes maneiras de reduzir o ruído do MPU-6050:
Use sensores calibrados: calibrar o acelerômetro e o giroscópio do MPU-6050 pode eliminar o viés e o erro dos próprios sensores, reduzindo assim o efeito do ruído.O processo de calibração geralmente consiste em dois estágios: calibração estática e calibração de movimento.
Processo de filtragem de hardware: Adicionar capacitores de filtro à linha de energia do MPU-6050 pode reduzir o impacto do ruído da fonte de alimentação no sensor.Enquanto isso, durante o layout da PCB, devemos tentar manter o MPU-6050 longe de fontes potenciais de interferência, como linhas de sinal de alta frequência e componentes de alta potência.
Processamento de filtragem de software: Depois de coletar os dados brutos do MPU-6050, podemos adicionar um link de filtragem de software para pré-processo os dados iniciais para eliminar a interferência induzida por ruído.Os métodos de filtragem de software comumente usados incluem filtragem média, filtragem mediana, filtragem Kalman e assim por diante.
Use filtro passa-baixo interno: MPU-6050 possui um filtro de passa-baixo digital integrado interno integrado, que pode ser usado para reduzir o ruído de alta frequência, definindo sua frequência de corte.Especificamente, podemos definir a frequência de corte do filtro digital modificando o registro de configuração do MPU-6050 para eliminar o ruído de alta frequência causado pela amostragem A/D.
Cálculo de trajetória de movimento baseado em MPU-6050
O MPU-6050 é um acelerômetro de seis eixos e sensor de giroscópio que pode ser usado para medir o movimento e a atitude dos objetos.O cálculo da trajetória de movimento com base no MPU-6050 pode ser realizado pelas seguintes etapas:
O primeiro passo é ler os dados do sensor.Precisamos ler os dados do acelerômetro e do giroscópio dos sensores MPU-6050 usando drivers apropriados e funções da biblioteca.Esses dados geralmente são emitidos em formato digital; portanto, é necessário algum trabalho de conversão e calibração para convertê -los em medições reais em unidades físicas.
O segundo passo é calcular a aceleração.Primeiro, precisamos processar os dados do acelerômetro para derivar a aceleração do objeto em cada eixo.Posteriormente, para calcular a velocidade e o deslocamento do objeto em cada eixo, precisamos integrar os dados de aceleração.Técnicas de integração numérica, como o método de Euler ou o método LUNGER-KUTTA, são frequentemente usadas nesse processo para garantir a precisão dos cálculos de deslocamento.
O terceiro passo é calcular a velocidade angular.Usando dados do giroscópio, a velocidade angular do objeto em cada eixo pode ser calculada.Novamente, esses dados precisam ser calibrados e convertidos para obter a velocidade angular nas unidades físicas reais.
O quarto passo é calcular a rotação.Ao integrar os dados de velocidade angular, o ângulo de rotação do objeto em cada eixo pode ser calculado.Isso pode ser feito usando técnicas de integração numérica, como o método de Euler ou o método Longe-Kutta para calcular o ângulo.
O quinto passo é mesclar os dados.Combinamos os dados de acelerômetros e giroscópios para obter informações completas de atitude e posição do objeto.Isso pode ser feito usando algoritmos como solucionador de atitude baseado em quaternion ou solucionador de ângulo de Euler.
O sexto passo é visualizar os resultados.Convertemos a trajetória de movimento do objeto computado em um conjunto de pontos em um sistema de coordenadas 3D e o exibimos usando ferramentas de visualização apropriadas para uma compreensão mais intuitiva da trajetória de movimento do objeto e mudanças de atitude.
Perguntas frequentes [FAQ]
1. Quão preciso é MPU6050?
Os resultados adquiridos mostraram precisão suficiente inferior a 1 % e confiabilidade, garantindo o dimensionamento adequado do eixo do elevador e os altos padrões da indústria de elevadores.
2. Como ler dados do MPU6050?
Para ler os registros internos do MPU6050, o mestre envia uma condição de início, seguida pelo endereço do escravo i2C e um bit de gravação e, em seguida, o endereço de registro que será lido.
3. Onde o MPU6050 é usado?
Em dispositivos de rastreamento de saúde vestíveis, dispositivos de rastreamento de fitness.Em drones e quadcopters, o MPU6050 é usado para controle de posição.Usado no controle do braço robótico.Dispositivos de controle de gestos manuais.
4. O MPU6050 é um IMU?
O bloco do sensor MPU6050 IMU lê dados do sensor MPU-6050 conectado ao hardware.O bloco sai aceleração, taxa angular e temperatura ao longo dos eixos do sensor.
5. Qual é o processamento do MPU6050?
Este é o processador a bordo do MPU6050 que combina os dados provenientes do acelerômetro e do giroscópio.O DMP é a chave para usar o MPU6050 e é explicado em detalhes posteriormente.Como em todos os microprocessadores, o DMP precisa de firmware para ser executado.
Sobre Nós
ALLELCO LIMITED
Consulte Mais informação
Inquérito rápido.
Por favor, envie uma consulta, responderemos imediatamente.

Guia aprofundado para LM317: Entendendo os reguladores de tensão ajustáveis
em 03/09/2024
Compreendendo o TL431: Um Guia Abrangente para Reguladores de Divisão de Precisão
em 03/09/2024
Postagens populares
-
O que é GND no circuito?
em 01/01/1970 3108
-

Guia do conector RJ-45: Códigos de cores do conector RJ-45, esquemas de fiação, aplicativos R-J45, folhas de dados RJ-45
em 01/01/1970 2672
-
Entendendo tensões da fonte de alimentação em eletrônicos VCC, VDD, VEE, VSS e GND
em 15/11/0400 2211
-

Tipos de conector de fibra: SC vs LC e LC vs MTP
em 01/01/1970 2182
-

Comparação entre DB9 e RS232
em 01/01/1970 1802
-

O que é uma bateria LR44?
A eletricidade, essa força onipresente, permeia silenciosamente todos os aspectos de nossas vidas diárias, desde aparelhos triviais até equipamentos médicos com risco de vida, ela desempenha um papel silencioso.No entanto, entender verdadeiramente essa energia, especialmente como armazenar e gerá -la com eficiência, não é uma tarefa fácil.É nesse contexto que este artigo se concentrará ...em 01/01/1970 1774
-
Compreendendo os fundamentos: resistência à indutância e capacitância
Na intrincada dança da engenharia elétrica, um trio de elementos fundamentais leva o centro do palco: indutância, resistência e capacitância.Cada um possui características únicas que ditam os ritmos dinâmicos dos circuitos eletrônicos.Aqui, embarcamos em uma jornada para decifrar as complexidades desses componentes, para descobrir seus papéis distintos e usos práticos dentro da vasta or...em 01/01/1970 1728
-

Guia abrangente da bateria CR2430: Especificações, aplicações e comparação com baterias CR2032
O que é a bateria CR2430?Benefícios das baterias CR2430NormaAplicações de bateria CR2430CR2430 equivalenteCR2430 vs CR2032Tamanho da bateria CR2430O que procurar ao comprar o CR2430 e equivalentesFolha de dados PDFPerguntas frequentes As baterias são o coração de pequenos dispositivos eletrônicos.Entre os muitos tipos disponíveis, as células da moeda desempenham um papel crucial, comumen...em 01/01/1970 1676
-
O que é RF e por que o usamos?
A tecnologia de radiofrequência (RF) é uma parte essencial da comunicação sem fio moderna, permitindo a transmissão de dados em longas distâncias sem conexões físicas.Este artigo investiga o básico da RF, explicando como a radiação eletromagnética (EMR) torna possível a comunicação de RF.Exploraremos os princípios do EMR, a criação e o controle dos sinais de RF e seus usos abrang...em 01/01/1970 1670
-
Guia abrangente de HFE em transistores
Os transistores são componentes cruciais em dispositivos eletrônicos modernos, permitindo a amplificação e controle do sinal.Este artigo investiga o conhecimento em torno do HFE, incluindo como selecionar o valor do HFE de um transistor, como encontrar o HFE e o ganho de diferentes tipos de transistores.Através de nossa exploração do HFE, obtemos um entendimento mais profundo de como os tra...em 15/11/5600 1632
Número da peça quente
-

AP3776MTR-G1
Diodes Incorporated
IC OFFLINE SWITCH FLYBACK 8SO
CC1206JRX7R7BB224
YAGEO
CAP CER 0.22UF 16V X7R 1206
C3216X7R1H475K160AC
TDK Corporation
CAP CER 4.7UF 50V X7R 1206
C4532Y5V1A107Z/3
TDK Corporation
CAP CER 100UF 10V Y5V 1812
1N1188
GeneSiC Semiconductor
DIODE GEN PURP 400V 35A DO5
650036
Astro Tool Corp
TURRET HEAD
SPU0409LE5H-QB
Knowles
MIC MEMS ANALOG OMNI -38DB
MAX15303AA00+CM
Analog Devices Inc./Maxim Integrated
IC REG BUCK ADJUSTABLE 6A 40TQFN
293D156X0025D2TE3
Vishay Sprague
CAP TANT 15UF 20% 25V 2917
IRFD420PBF
Vishay Siliconix
MOSFET N-CH 500V 370MA 4DIP
MIC5205-3.3YM5-TR
Microchip Technology
IC REG LINEAR 3.3V 150MA SOT23-5
NTE5575
NTE Electronics, Inc
SCR 200V 125A TO83
CR75NP-100KC
Sumida America Components Inc.
FIXED IND 10UH 2.3A 70 MOHM SMD
TMS320DM368ZCEF
Texas Instruments
IC DGTL MEDIA SOC 338NFBGA
MTM231230L
Panasonic Electronic Components
MOSFET P-CH 20V 3A SMINI3-G1
DMNH10H028SPS-13
Diodes Incorporated
MOSFET N-CH 100V 40A PWRDI5060-8
M29W010B70K6E
Micron Technology Inc.
IC FLASH 1MBIT PARALLEL 32PLCC
889474AKLF
Renesas Electronics America Inc
IC CLK BUFFER 2:2 2GHZ 24VFQFN -

MDD142-18N1
IXYS
DIODE MODULE 1.8KV 165A Y4-M6
0451020.MRL
Littelfuse Inc.
FUSE 65V V/FA NANO2 W/AU CAPS 20
08051U5R6BAT2A
KYOCERA AVX
CAP CER 5.6PF 100V NP0 0805
EE-SX1106
Omron Electronics Inc-EMC Div
SENSOR OPT SLOT PHOTOTRAN PCB MT
XC7A35T-L2CSG325E
AMD
IC FPGA 150 I/O 324CSBGA
407F35D012M0000
CTS-Frequency Controls
CRYSTAL 12.0000MHZ 18PF SMD
S-1701F3328-M5T1G
ABLIC Inc.
IC REG CONV BATTERY 1OUT SOT23-5
GRM1885C1H390GA01J
Murata Electronics
CAP CER 39PF 50V C0G/NP0 0603
MTP5N40E
onsemi
N-CHANNEL POWER MOSFET
GRT155R60J225ME01D
Murata Electronics
CAP CER 2.2UF 6.3V X5R 0402
UC3845B
UMW
SOP-8 AC-DC CONTROLLERS & REGULA
OPA2349UA
Texas Instruments
IC CMOS 2 CIRCUIT 8SOIC
MK10DX256VLQ10
NXP USA Inc.
IC MCU 32BIT 256KB FLASH 144LQFP
PC6-12-12
TDK-Lambda Americas Inc
DC DC CONVERTER 12V 6W
XC2C64A-7PCG44C
AMD
FLASH PLD, 7.5NS, 64-CELL PQCC44
SIT1552AC-JE-DCC-32.768D
SiTime
MEMS OSC TCXO 32.7680KHZ LVCMOS
UC3906Q
Unitrode
IC BATT CHG LEAD ACID 20PLCC
X5163S8IZ
Renesas Electronics America Inc
IC SUPERVISOR 1 CHANNEL 8SOIC -
08051C183JAT4A
KYOCERA AVX
CAP CER 0.018UF 100V X7R 0805
TMS320C6713BZDP225
Texas Instruments
IC FLOATING-POINT DSP 272-BGA
CL55B105KBINNNE
Samsung Electro-Mechanics
CAP CER 1UF 50V X7R 2220
70200-501
Laird Thermal Systems, Inc.
PELTIER CP14,71,10,L1,RT,W4.5
ISL6529CR
Intersil
SWITCHING CONTROLLER
MMBF102
onsemi
JFET N-CH 25V 20MA SOT23
MC68302RC20C
Freescale Semiconductor
LAN CONTROLLER, CMOS, CPGA132
22-21/GHC-YR1S2/2C
Everlight Electronics Co Ltd
LED GREEN CLEAR SMD
PIC16F628-04I/SS
Microchip Technology
IC MCU 8BIT 3.5KB FLASH 20SSOP
APT1231W
Panasonic Electric Works
PHOTOTRIAC COUPLER 600V 4DIP
ADS54J40IRMP
Texas Instruments
IC ADC 14BIT PIPELINED 72VQFN
FQPF5N60C
onsemi
MOSFET N-CH 600V 4.5A TO220F
OPA2134UA/2K5
Texas Instruments
IC AUDIO 2 CIRCUIT 8SOIC
M93C66-WMN6P
STMicroelectronics
IC EEPROM 4KBIT MICROWIRE 8SOIC
UC3855BDWTR
Texas Instruments
IC PFC CTR AVERAGE 500KHZ 20SOIC
AT29C256-90TI
Microchip Technology
IC FLASH 256KBIT PARALLEL 28TSOP
ADP2291ARMZ-R7
Analog Devices Inc.
IC BATT CHG LI-ION 1CELL 8MSOP
S9S08SG8E2MTJ
NXP USA Inc.
IC MCU 8BIT 8KB FLASH 20TSSOP