TB6600HG Driver de motor de passo: especificações, recursos e aplicações
Catálogo
TB6600HG Descrição

TB6600HG é um pwm hhopper tipo chip único bipolar sinusoidal Microstepping Motor Driver.Ele pode atingir o controle de rotação avançado e reverso através dos modos de excitação 2W1-2 de fase 2-2, fase 1-2 e fase W1-2, 2W1-2 e 4W1-2.Os motores de passo bipolares de 2 fases são acionados apenas por um sinal de relógio de baixa vibração e alta eficiência.
Alternativas e equivalentes:
• TB6600FG
• L6258EX
Especificações do TB6600HG
• Status da peça: ativo
• Embalagem: bandeja
• Pacote / caso: HZIP-25
• Fabricante: Toshiba
• Corrente de fornecimento operacional: 4,2 Ma
• Tensão de fornecimento operacional: 2 V a 5,5 V
• Classificação de tensão de carga: 8 V a 42 V
• Número de saídas: 2 saídas
• PD - Dissipação de energia: 40 W
• Estilo de montagem: através do buraco
• Comprimento/largura/altura do pacote: 29,3 mm (máx) /4.5mm/15.7mm
• Categoria do produto: controladores e drivers de motor / movimento / ignição
Condições operacionais do TB6600HG
(Ta = -30 ° C a 85 ° C)
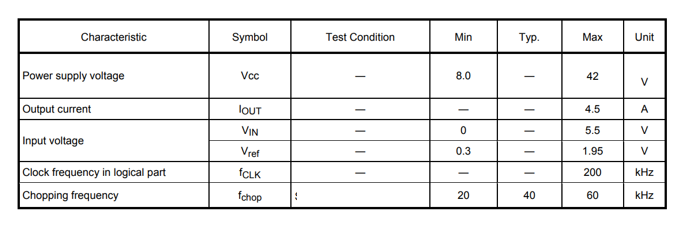
Nota: Dois terminais VCC devem ser programados a mesma tensão.A corrente máxima do intervalo operacional não pode ser necessariamente conduzida, dependendo de várias condições, porque a corrente de saída é limitada pelo PD de dissipação de energia.Evite usar o IC na condição que faria com que a temperatura exceda o TJ (avg.) = 107 ° C.
A tensão da fonte de alimentação de 42 V e a corrente de saída de 4,5 A são os valores máximos da faixa operacional.Projete o circuito com derrada o suficiente nesse intervalo, considerando a variação da fonte de alimentação, a resistência externa e as características elétricas do IC.No caso de exceder a tensão da fonte de alimentação de 42 V e a corrente de saída de 4,5 A, o IC não operará normalmente.
Como conectar o TB6600HG ao sistema de controle?
Conexão de energia: primeiro, certifique -se de fornecer fonte de alimentação apropriada ao TB6600HG.Ao alimentar o TB6600HG, você geralmente precisa conectar dois pinos: VCC (fonte de alimentação positiva) e GND (fio terra).O pino VCC é responsável por fornecer a tensão necessária para acionar o chip, enquanto o pino GND serve como o nível do solo de referência.Precisamos garantir que a fonte de alimentação seja estável e atenda às especificações do TB6600HG.
Conexão do sinal: De acordo com as necessidades específicas do sistema de controle, precisamos conectar o sinal de controle ao pino correspondente do chip de driver TB6600HG.Esses sinais de controle geralmente incluem sinais de controle de direção e sinais de pulso de etapa, etc., responsáveis por instruir como o motor atua, incluindo a direção da rotação e a velocidade de rotação.
Conexão do motor: precisamos ter cuidado ao conectar o motor ao chip de driver TB6600HG.Os dois fios do motor, geralmente vermelho e preto, representam os pólos positivos e negativos do motor, respectivamente.O fio vermelho geralmente se conecta ao terminal positivo do motor, enquanto o fio preto se conecta ao terminal negativo.
Conexão de feedback (opcional): Se um codificador for usado para controle de feedback, também precisamos conectar o sinal de saída do codificador ao sistema de controle.Isso normalmente inclui as saídas da Fase A, Fase B e Fase Z (se disponível).
Aterramento: precisamos garantir que o fio do solo comum de todos os equipamentos esteja conectado corretamente para evitar interferências e danos.
Configurações de inicialização: Após a conclusão da conexão, precisamos inicializar as configurações do TB6600HG para garantir que ela funcione corretamente.Isso pode incluir definir limites de corrente, modos de passo, etc.
Recursos do produto TB6600HG
• Adote um radiador aumentado para uma boa dissipação de calor
• As instruções de configuração da subdivisão são impressas na parte traseira da placa
• Com função de proteção de curto-circuito de saída, uso sem preocupações
• Adote 6N137 Acoplamento óptico de alta velocidade para garantir alta velocidade sem perda de sincronização
• Corrente de saída é ajustável para atender às suas várias necessidades de aplicação
• Usando o modo de entrada de ânodo comum, existem dois terminais de entrada, tornando a fiação mais conveniente
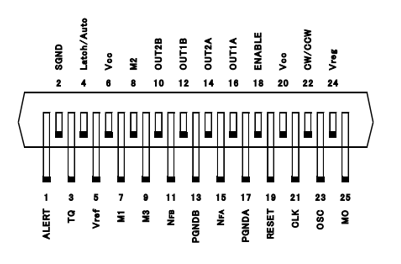
Configuração do pino do TB6600HG
Descrição da função do TB6600HG
Configurações de excitação
O modo de excitação pode ser selecionado entre os oito modos a seguir usando as entradas M1, M2 e M3.Quando as entradas M1, M2 ou M3 são deslocadas durante a operação do motor, um novo modo de excitação inicia do modo inicial, potencialmente interrompendo a continuidade da forma de onda de corrente de saída.
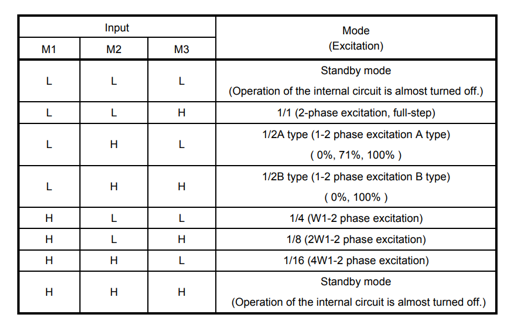
Nota: Para alterar o modo emocionante alterando M1, M2 e M3, certifique -se de não definir M1 = M2 = M3 = L ou M1 = M2 = M3 = H.
Modo de espera
O modo de operação se move para o modo de espera sob a condição m1 = m2 = m3 = L ou m1 = m2 = m3 = H. O consumo de energia é minimizado ao desligar todas as operações, exceto a operação de proteção.No modo de espera, o terminal de saída MO é Hz.O modo de espera é liberado alterando o estado de m1 = m2 = m3 = l e m1 = m2 = m3 = h para outro estado.O sinal de entrada não é aceito por cerca de 200 μs após a liberação do modo de espera.
Modo de decaimento
Carregar e descarregar uma corrente no modo PWM normalmente requerem cerca de cinco ciclos no OSCM.O modo de decaimento rápido de 40 % é iniciado pela indução de decaimento dentro dos dois ciclos finais do modo de decaimento rápido, com a proporção de 40 % permanecendo consistentemente fixos.A relação entre a frequência do relógio mestre (FMCLK), a frequência do OSCM (FOSCM) e a frequência PWM (FCHOP) é mostrada da seguinte maneira:
foscm = 1/20 × fmclk
fchop = 1/10 × fmclk
Quando Rosc = 51kΩ, o relógio mestre = 4mHz, oscm = 200kHz, a frequência de pwm (fchop) = 40kHz.
Modo inicial
Quando a redefinição é usada, as correntes de fase são as seguintes.
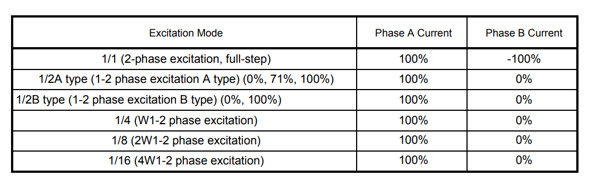
A direção atual é definida da seguinte maneira.
Out1a → out2a: direção avançada
Out1b → out2b: direção para a frente
Aplicação de TB6600HG
Listados abaixo estão algumas aplicações do TB6600HG.
• Luzes traseiras
• Edifícios de hospitalidade
• Exiba LED ao ar livre grande
• Alternativa às luzes ocultas
• Luzes industriais de alto baio
• Luz de fundo LED de grande formato
• Exibir a luz de fundo LED
• Smartphones habilitados para câmera
• Topologias de driver intensificadas ou afastadas
Falhas e soluções comuns do TB6600HG
O seguinte lista algumas falhas comuns sobre o TB6600HG e suas soluções para ajudá -lo a tomar medidas rápidas ao encontrar falhas e proteger a operação normal do dispositivo.
Falha um: superaquecimento de chip de motorista
O chip TB6600HG em si é muito quente, provavelmente devido a carga excessiva ou condições ruins de dissipação de calor.
Solução: Aumente a dissipação de calor
Precisamos adicionar dissipadores de calor ou ventiladores no chip de motorista e motor para garantir que eles possam dissipar completamente o calor enquanto trabalham.Ao mesmo tempo, precisamos manter o ambiente ao redor do chip de motorista e do motor bem ventilado para evitar superaquecimento.
Falha dois: o motor gira na direção errada
Depois que o motor recebe o sinal da unidade, a direção da rotação não está alinhada com o esperado, pode ser que o sinal de controle esteja errado ou o chip de unidade não está configurado corretamente.
Solução: Verifique o sinal de controle
Precisamos verificar cuidadosamente os sinais de controle enviados ao TB6600HG para garantir que o sinal de controle de direção e o sinal de pulso estejam corretos.Se um microcontrolador for usado para enviar os sinais, verifique o código do programa e a configuração do PIN.
Falha três: o motor não gira
O motor não responde depois de receber o sinal da unidade, pode ser que o chip de driver não esteja funcionando corretamente ou haja um problema com a conexão entre o motor e o chip do driver.
Solução: Verifique a fonte de alimentação e a conexão
Precisamos garantir que a fonte de alimentação do TB6600HG seja normal e a conexão entre o motor e o chip de driver seja sólida.Verificamos a tensão e a corrente no circuito usando um multímetro para garantir que eles estejam no intervalo normal.
Falha quatro: aquecimento sério do motor
O motor gera calor excessivo durante a operação, o que pode ser causado por corrente excessiva ou baixa dissipação de calor.
Solução: ajuste a configuração atual
Se o motor estiver gerando calor grave, podemos tentar reduzir a corrente de saída do chip de driver.Ao ajustar o pino de configuração atual do TB6600HG, podemos limitar efetivamente o tamanho da corrente de saída, o que, por sua vez, reduz a carga no motor e garante operação estável e segura do motor.
Perguntas frequentes [FAQ]
1. Qual é a faixa de temperatura operacional do TB6600HG?
A temperatura operacional do TB6600HG varia de -30 ° C a 85 ° C.
2. O que é TB6600HG?
O TB6600HG é um tipo de driver de motor de passo, projetado para controlar os motores de passo em várias aplicações, como máquinas CNC, impressoras 3D, robótica e sistemas de automação.
3. Quais são os principais recursos do TB6600HG?
Os recursos do TB6600HG incluem corrente do motor ajustável, configurações de resolução de etapas, proteção de superaquecimento interno e entradas opto-isoladas para controle de sinal.